Sample Code of VMS stabilizaiton in mixed form 2D Stokes: Lid-Driven Cavity
written by L. Zhu and A. Masud (2019).
Contents
This script is served to illustrate the general paradigm for implementation of Variational Multiscale (VMS) method for partial differential equations (PDE) with intrinsic instabilities. Specifically, a mixed form of incompressible Stokes flow is solved with equal order interpolation (linear quadrilateral element) of velocity and pressure fields.
For the extension of the VMS method for incompressible Navier-Stokes equations and isothermal turbulence model for Large Eddy Simulation (LES), interested readers are referred to Masud & Khurram 2006 and Masud & Calderer 2011.
clearvars; close all;
Mesh generation
Mesh generation:  stretched Q4 element
stretched Q4 element
res_el_1D = 40; % Number of elements per dimension res_node_1D = res_el_1D + 1; % Number of nodes perdimension ndf = 3; % Number of degrees of freedom per node (u1, u2, p) nel = 4; % Number of nodes per element (Q4) x_unif = linspace(0, res_el_1D, res_node_1D) / res_el_1D; % 1D coordinates for uniform mesh [Ycoord, Xcoord] = meshgrid(x_unif, x_unif); % Generate spatial grid nnode = res_node_1D ^ 2; % Number of nodes for the 2D domain node_num = linspace(1, nnode, nnode); % Node numbering in vector form node_num_mtx = reshape(node_num, [res_node_1D, res_node_1D]); % Node numbering in matrix form
Gaussian Quadrature Rules
3 integration points in each dimension
wght_1D = [5/9, 8/9, 5/9]; % weights of 1D integration rule gp_loc_1D = [-sqrt(3/5), 0, sqrt(3/5)]; % location of 1D integration rule gp_2D = zeros(9, 3); % location and weight of 2D integration rule: 9 points k = 0; for i = 1:3 for j = 1:3 k = k + 1; gp_2D(k, :) = [gp_loc_1D(i), gp_loc_1D(j), wght_1D(i)*wght_1D(j)]; end end
Stabilized Weak Form
Strong Form


Stabilized Weak Form

Stabilization Tensor

R_global = zeros(nnode*ndf); % Initialize the global residual (zero in this test case) K_global = zeros(nnode*ndf, nnode*ndf); % Initialize the global consistent tangent matrix xl = zeros(2, 4); % Initialize the element-wise nodal coordinates matrix
Loop Over the Elements
for j = 1:res_el_1D for i = 1:res_el_1D
xl(1,:) = [x_unif(i), x_unif(i+1), x_unif(i+1), x_unif(i)]; % Fetch x coordinate xl(2,:) = [x_unif(j), x_unif(j), x_unif(j+1), x_unif(j+1)]; % Fetch y coordinate node_el = [node_num_mtx(i,j), node_num_mtx(i+1,j), node_num_mtx(i+1,j+1), node_num_mtx(i,j+1)]; % Element connectivity
Numerical Quadrature for VMS stabilizaiton tensor 
Tau_dnm = zeros(ndf-1, ndf-1); % Denominator Tau_nmr = 0.0; % Numerator for l = 1 : 9 % Loop over quadrature points
% shape function and its derivatives at Gaussian point l
[shg, ~, jcb] = shp_bbl_Q4(xl, gp_2D(l,1:2));
bbl = shg(3,5); bbl1 = shg(1,5); bbl2 = shg(2,5);
Denominator of Tau: 
Tau_dnm = Tau_dnm + [2.0*bbl1^2+bbl2^2, bbl1*bbl2;
bbl1*bbl2, bbl1^2+2.0*bbl2^2] * jcb * gp_2D(l,3);
Numerator of Tau: 
Tau_nmr = Tau_nmr + bbl * jcb * gp_2D(l,3);
end Tau_hat = inv(Tau_dnm) * Tau_nmr; % Compute the stabilizaiton tensor
Numerical Quadrature for Consistent Tangent
k_local = zeros(nel*ndf, nel*ndf);
for l = 1 : 9
% shape function and its derivatives at Gaussian point l
[shg, shgs, jcb] = shp_bbl_Q4(xl, gp_2D(l,1:2));
% location of Gaussian point in physical coordinates
x_GP = shg(3,1:4) * xl(1,:)';
y_GP = shg(3,1:4) * xl(2,:)';
% Enrich the fine-scale solution with bubble basis
Tau11 = Tau_hat(1,1) * shg(3,5); Tau22 = Tau_hat(2,2) * shg(3,5);
for a = 1 : nel
Na = shg(3,a); Na1 = shg(1,a); Na2 = shg(2,a); Na12 = shgs(3,a);
for b = 1 : nel
Nb = shg(3,b); Nb1 = shg(1,b); Nb2 = shg(2,b); Nb12 = shgs(3,b);
Galerkin diffusion: 
k_Diff_Gal = [Na1*Nb1*2.0 + Na2*Nb2, Na2*Nb1, 0;
Na1*Nb2, Na1*Nb1 + Na2*Nb2*2.0, 0;
0, 0, 0];
Galerkin duality of incompressibility: 
k_C_Gal = [0, 0, -Na1*Nb;
0, 0, -Na2*Nb;
Na*Nb1, Na*Nb2, 0];
VMS Terms: 
k_VMS = [-Na12*Tau22*Nb12, 0, Na12*Tau22*Nb2;
0, -Na12*Tau11*Nb12, Na12*Tau11*Nb1;
-Na2*Tau22*Nb12, -Na1*Tau11*Nb12, Na1*Tau11*Nb1+Na2*Tau22*Nb2];
% Element-wise consistant tangent
k_gp = k_Diff_Gal + k_C_Gal + k_VMS;
k_local((a-1)*ndf+1:a*ndf,(b-1)*ndf+1:b*ndf) = ...
k_local((a-1)*ndf+1:a*ndf,(b-1)*ndf+1:b*ndf) + k_gp * jcb * gp_2D(l,3);
end end end
Assembly The Global Consistent Tangent
for a = 1:nel for b = 1:nel K_global(node_el(a)*ndf-2:node_el(a)*ndf, node_el(b)*ndf-2:node_el(b)*ndf) = ... K_global(node_el(a)*ndf-2:node_el(a)*ndf, node_el(b)*ndf-2:node_el(b)*ndf) + ... k_local(a*ndf-2:a*ndf,b*ndf-2:b*ndf); end end
end end
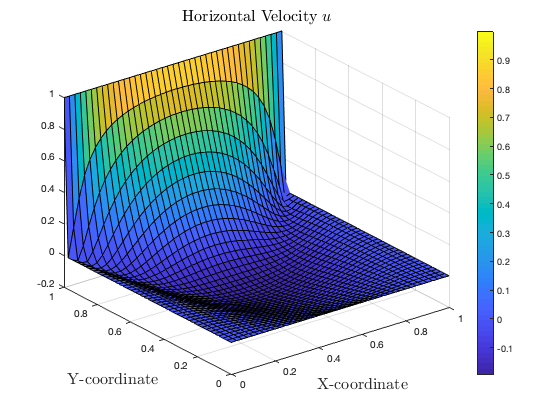
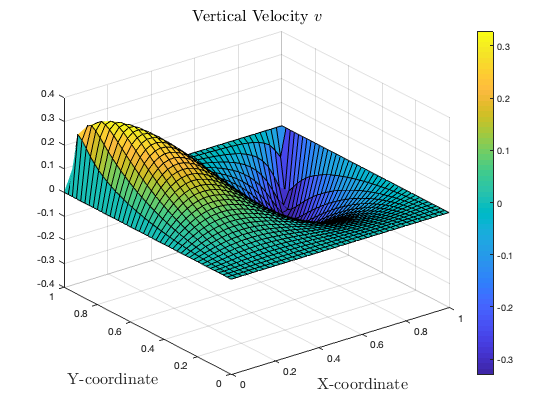
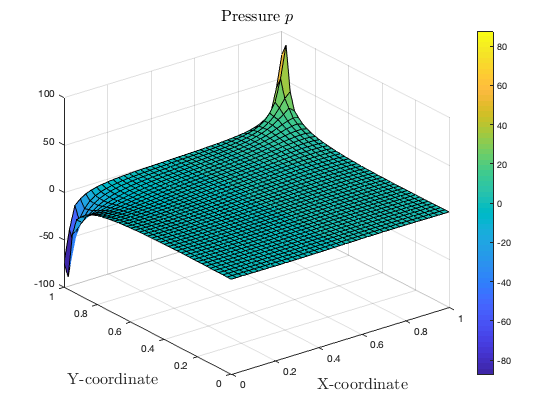
Boundary Condition: Lid-Driven Cavity
No-slip Dirichlet BCs on the bottom ( ), left (
), left ( ) and right (
) and right ( )
)
Prescribed velocity on the top ( ):
):  and
and  .
.
DOF_list = linspace(1, nnode*ndf, nnode*ndf); % Global DOF list DOF_list_mtx = reshape(DOF_list, [3, nnode]); % Global DOF list matrix: ndf by #nodes BC_mask_mtx = zeros(size(DOF_list_mtx)); % Mask for the slots with Dirichlet BCs BC_mask_mtx(1:2,node_num_mtx([1,end],:)) = 1; % left and right wall BC_mask_mtx(1:2,node_num_mtx(:,[1,end])) = 1; % bottem and top wall BC_mask_mtx(3,node_num_mtx(1,1)) = 1; % Fixed pressure at (0,0) to remove constant pressure mode BC_mask = reshape(BC_mask_mtx, [nnode*ndf, 1]); % mask vector idx_BC = find(BC_mask>0.5); % indices of DOFs that has Dirichlet BC idx_sol = find(BC_mask<0.5); % indices of unknown DOFs BC_val_mtx = zeros(size(DOF_list_mtx)); % Boundary Values BC_val_mtx(1,node_num_mtx(:,end)) = 1.0; % Unit horizontal velocity on the top BC_val = reshape(BC_val_mtx, [nnode*ndf, 1]);
Static Condenstaion (Guyan Reduction)
uvp_global = BC_val; uvp_global(idx_sol) = K_global(idx_sol, idx_sol) \ (R_global(idx_sol) - K_global(idx_sol, idx_BC) * uvp_global(idx_BC));
Visualization of the solution
u_gl = reshape(uvp_global(DOF_list_mtx(1,:)), [res_node_1D, res_node_1D]); v_gl = reshape(uvp_global(DOF_list_mtx(2,:)), [res_node_1D, res_node_1D]); p_gl = reshape(uvp_global(DOF_list_mtx(3,:)), [res_node_1D, res_node_1D]); figure; surf(Xcoord, Ycoord, u_gl); xlabel('X-coordinate', 'FontSize', 16, 'Interpreter','latex'); ylabel('Y-coordinate', 'FontSize', 16, 'Interpreter','latex'); title('Horizontal Velocity $u$', 'FontSize', 16, 'Interpreter','latex'); colorbar; figure surf(Xcoord, Ycoord, v_gl); xlabel('X-coordinate', 'FontSize', 16, 'Interpreter','latex'); ylabel('Y-coordinate', 'FontSize', 16, 'Interpreter','latex'); title('Vertical Velocity $v$', 'FontSize', 16, 'Interpreter','latex'); colorbar; figure surf(Xcoord, Ycoord, p_gl); xlabel('X-coordinate', 'FontSize', 16, 'Interpreter','latex'); ylabel('Y-coordinate', 'FontSize', 16, 'Interpreter','latex'); title('Pressure $p$', 'FontSize', 16, 'Interpreter','latex') colorbar; % figure % quiver(Xcoord, Ycoord, u_gl, v_gl); % startx = x_streched'; % starty = ones(size(startx))*0.5'; % streamline(Xcoord, Ycoord, u_gl, v_gl, startx, starty) % xlim([-0.1, 1.1]); ylim([-0.1, 1.1]); % xlabel('X-coordinate', 'FontSize', 16, 'Interpreter','latex'); % ylabel('Y-coordinate', 'FontSize', 16, 'Interpreter','latex');
Shape functions and bubble function and their derivatives for Q4 elements
bubble function:

% input : xl(2,4) nodal coordinates of the element % input : gp(2) location of Gaussion points % output: shg(3,5) shape function and its derivatives % output: shg2(3,5) 2nd order derivatives of shape functions % output: jcb jacobian function [shg, shgs, jcb] = shp_bbl_Q4(xl, gp) shg = zeros(3, 5); shgs = zeros(3, 4); x_el = xl(1,2) - xl(1,1); % x2 - x1 y_el = xl(2,4) - xl(2,1); % y4 - y1 jcb = x_el * y_el / 4; % affine elements only xi = gp(1); eta = gp(2); % shape functions shg(3,1) = 0.25 * (1 - xi) * (1 - eta); shg(3,2) = 0.25 * (1 + xi) * (1 - eta); shg(3,3) = 0.25 * (1 + xi) * (1 + eta); shg(3,4) = 0.25 * (1 - xi) * (1 + eta); shg(3,5) = (1 - xi^2) * (1 - eta^2); % x derivative shg(1,1) = 0.25 * (-1 + eta); shg(1,2) = 0.25 * ( 1 - eta); shg(1,3) = 0.25 * ( 1 + eta); shg(1,4) = 0.25 * (-1 - eta); shg(1,5) = -2 * xi * (1 - eta^2); % y derivative shg(2,1) = 0.25 * (-1 + xi); shg(2,2) = 0.25 * (-1 - xi); shg(2,3) = 0.25 * ( 1 + xi); shg(2,4) = 0.25 * ( 1 - xi); shg(2,5) = -2 * eta * (1 - xi^2); % xx derivative % yy derivative % xy derivative shgs(3,1:4) = [0.25, -0.25, 0.25, -0.25] / jcb; % affine element only % physical derivative shg(1,:) = shg(1,:) * 2 / x_el; % affine element only shg(2,:) = shg(2,:) * 2 / y_el; % affine element only end